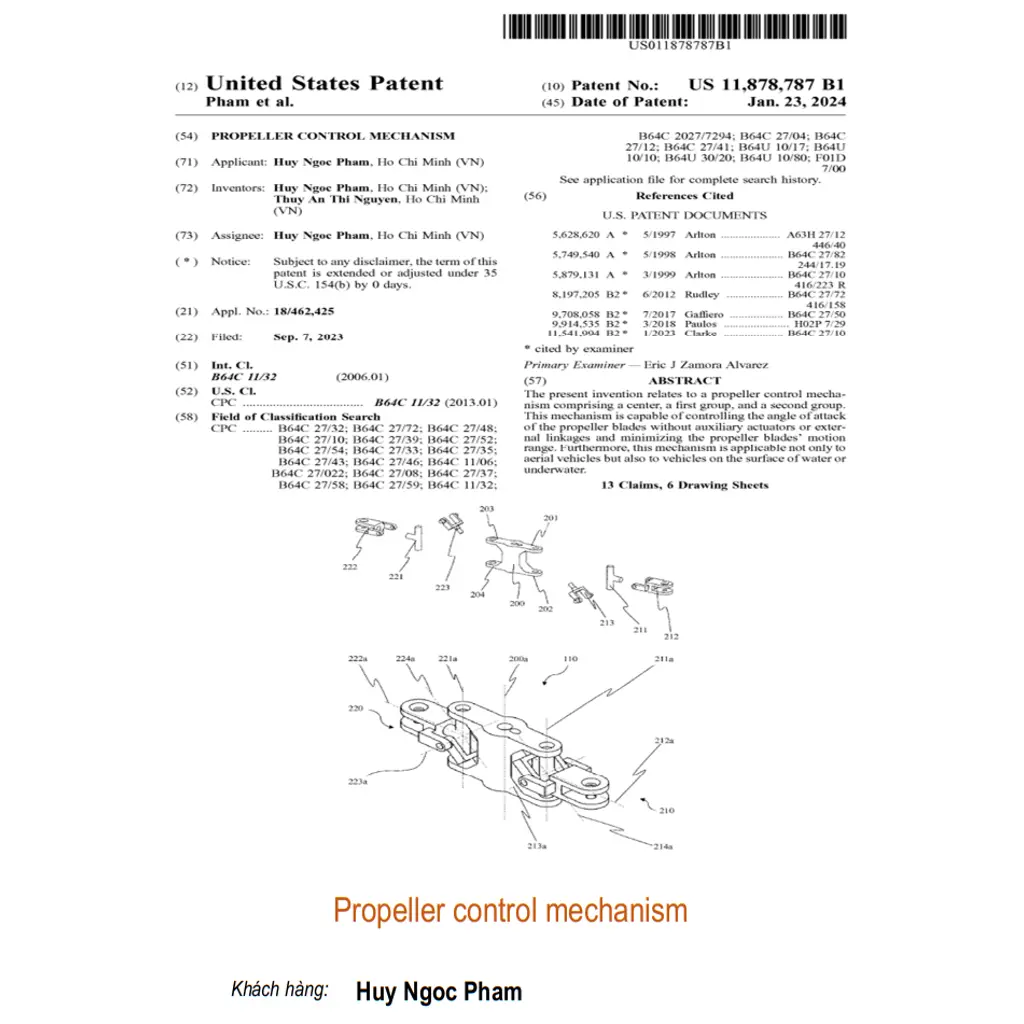
The present invention relates to a propeller control mechanism comprising a center, a first group, and a second group. This mechanism is capable of controlling the angle of attack of the propeller blades without auxiliary actuators or external linkages and minimizing the propeller blades' motion range. Furthermore, this mechanism is applicable not only to aerial vehicles but also to vehicles on the surface of water or underwater.